
障碍识别系统
机器人Atlas通过头部激光障碍识别系统(LIDAR)所看到的景象,该技术主要通过向周边环境发射镭射激光,然后根据这些激光的反馈方式进行分析才得出的周边环境图像。

立体接近相机
Atlas总共拥有两个“立体接近相机”(stereo proximity cameras)以及一个位于头部、微微向下的第三相机,而图中便是Atlas三个相机所构成的一副全景图片。
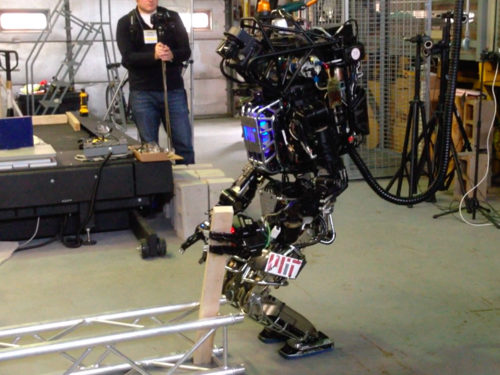
Atlas找到一个木块
据了解,激光障碍识别系统技术的精确度非常高,且会同时向三个方向发射激光。如果你仔细看图片的话你会看到Atlas脚下有一条绿色和一条黄色的指示线,这实际上就是Atlas所作出的移动路线决策,而它的最终目的就是拿到最远端的那根木板。

Atlas成功完成任务
通过以上这些系统的存在使得Atlas能够完成诸多依赖于周边环境的复杂任务,比如分辨目标物体、接近目标以及捡起目标物体等任务。Atlas最终成功完成任务。
标签:服务器



")
")

")
")
")
